
.png)
.png)
ЧІМ НАШ ПРОЕКТ КРАЩЕ ІНШИХ
В ідеї «збільшення дронів» немає нічого нового чи оригінального!
Зараз в інтернеті є інформація про масу проектів, творці яких намагаються здійснити цю ідею. Майже всі ці проекти повторюють технічні рішення невеликих дронів.
Ми підійшли до вирішення цієї проблеми комплексно!
Більше того – на відміну від безлічі проектів, що широко рекламують себе в пресі, але не мають нічого крім комп’ютерних картинок, нами реально СПРОЕКТУВАНІ, ВИГОТОВЛЕНІ ТА ВИПРОБУВАНІ:
– електроннокеровані гвинти змінного кроку;
– трансмісія;
– електронна система управління двигуном.

Відео реальних випробувань можна побачити на нашому каналі YouTube – https://www.youtube.com/channel/UCWBKG8SqTNnHoY0jIDAYJGw/videos
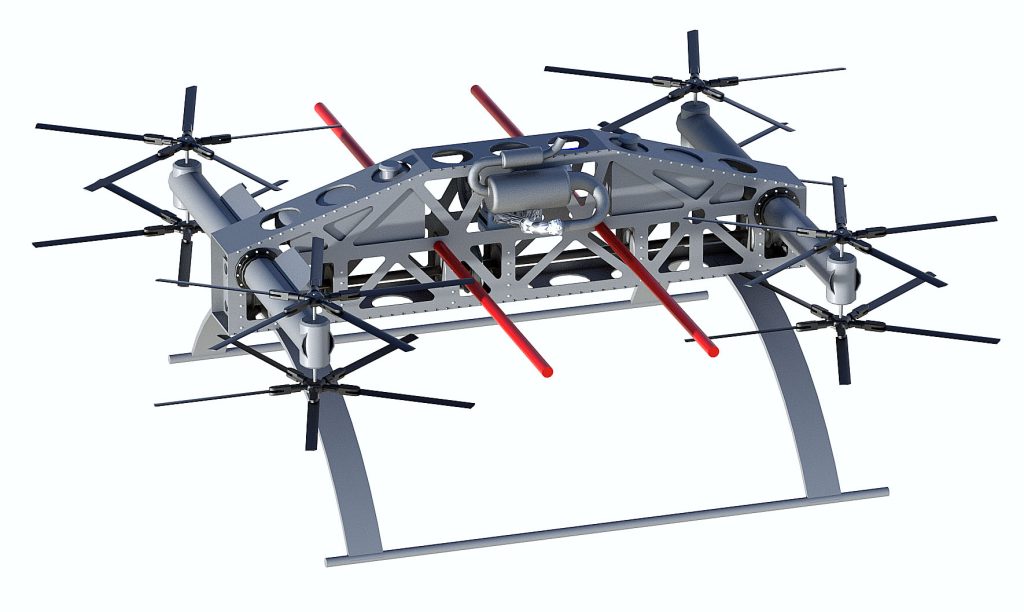
Для забезпечення розумного компромісу між керованістю, надійністю та ККД, для управління польотом, ми вибрали схему з ГЗК (повітряними гвинтами змінного кроку).
Фактично ми створюємо «універсальну платформу», яка дозволяє створити апарат, найбільш підходящий користувачеві – ПІЛОТОВАНИЙ І БЕЗПІЛОТНИЙ варіант, з ЕЛЕКТРОДВИГУНАМИ і з ДВИГУНАМИ ВНУТРІШНЬОГО ЗГОРЯННЯ (ДВЗ).
З однакових основних вузлів (системи керування польотом – польотного контролера та електроннокерованих ГЗК) можна “збирати” апарат з електромоторами і з ДВЗ.
При цьому, для збільшення вантажопідйомності (якщо знадобиться не 2-х, а 4-місний варіант) не потрібно встановлювати 6-8-10 і більше повітряних гвинтів і моторів. Схема не змінюється – 4 ГЗК, потрібно лише змінити діаметр пропелера.
-2-
ВИБРАНА НАМИ СХЕМА
Практично всі існуючі проекти інших стартапів виросли з ідеї «масштабування» звичайних маленьких ЕЛЕКТРОдронів — квадро-, гекса, окто- та інших коптерів.
Тому у проектів, що з’являються, багато двигунів – за образом і подобою маленьких дронів, що добре літають.
Але почавши збільшувати масштаб дрону, проектувальники стикаються з проблемою – ДРОНИ НЕ МАСШТАБУЮТЬСЯ!
Точніше — способи вирішення проблем маленьких дронів не підходять до великих.
Так як для керування маленьким дроном досить просто змінювати оберти відповідних двигунів.
Але на великому дроні, навіть із електродвигунами, це не спрацьовує! Так як одна справа – змінювати оберти (і відповідно тягу) маленького двигуна з вагою повітряного гвинта в 5-10 грамів, і інша – спробувати швидко змінити оберти повітряного гвинта вагою в 2-3 кілограми, що обертається на 3000 обертів!
Інерція повітряних гвинтів заважає!
Тому ставлять багато маленьких електродвигунів із маленькими повітряними гвинтами.
Проблема інерції (і відповідно управління) частково вирішується…
АЛЕ!.. З’являються інші проблеми. Але вони не такі очевидні. Принаймні поки це прототипи. Чи не розраховані на практичне використання.
Одна з проблем – ККД.
ККД одного двигуна на 100 кВт значно вища за 10 двигунів по 10 кВт.
ККД та тяга одного пропелера площею 10 кв.м. набагато вище, ніж у 10 пропелерів по 1 кв.
Тобто при спробі просто збільшити маленький дрон, використовуючи велику кількість маленьких двигунів з маленькими пропелерами, і так невеликий запас енергії в акумуляторі бездарно витрачається на нагрівання навколишнього повітря, а не на корисну роботу!
Навіть для перевезення одного пасажира в інших проектах передбачається використовувати 8-16 моторів!
А якщо потрібний апарат для перевезення тонни вантажу? 30?.. 50 двигунів ставити?
При спробі замінити електродвигуни на ДВС – з’являються ще й інші проблеми – спроба швидко змінити тягу ДВС теж не просто вирішується … Знову-таки – інерція двигуна!
Тому ми вибрали оптимальну схему, що дозволяє уникнути перелічених вище недоліків – апарат з ДВС і електроннокерованими ГЗК.

-3-
БЕНЗИН чі ЕЛЕКТРИЧЕСТВО?
В даний час активно та дуже швидко розвивається електротранспорт. За ним майбутнє! Але літати слід не завтра, а вже сьогодні. І тут постає проблема.
Для нормального руху електромобіля йому достатньо електромотора потужністю близько 100 кВт. І ємності батареї в 55-85 кВч достатньо (враховуючи, що повна потужність двигуна використовується тільки при розгоні) для роботи електродвигуна протягом 4-6 годин, і забезпечується пробіг в 300-500 км. Чого здебільшого цілком достатньо, особливо для їзди у місті.
Для нормального польоту легкого літака, вагою 650 кг, достатньо тяги повітряного гвинта 150-200кг, що забезпечує електродвигун потужністю в ті ж 100кВт. Але літак, на відміну від автомобіля, летить за постійної потужності в 70-80% від максимальної. І батареї в 55-85 кВч вистачить лише на 30-40 хвилин польоту. Але це вже більш-менш реально.
Але для вертикального зльоту та польоту літального апарату типу вертольота або коптера вагою 650 кг потрібна тяга повітряних гвинтів у 750-850 кг! І тут потрібна потужність двигунів 200-250 кВт. Відповідно, батареї в 55-85 кВч вистачить лише на 5-10 хвилин польоту.
На жаль, цього занадто мало для нормальної експлуатації.
Але прогрес у розвитку акумуляторів продовжується. І на момент появи відповідних акумуляторів мають бути готові інші технічні рішення.
Ми так і робимо!
У нашій конструкції, і у варіанті з електромоторами, і з ДВС, використовуються однакові системи керування польотом (польотний контролер) та електроннокеровані ГЗК.
Їх конструкція нами створена та випробувана.
В даний час ми створили апарат з ДВЗ. З причин фінансового характеру (поки ми реалізуємо наш проект власним коштом, без інвесторів), купівля електромоторів та батареї поки що виходить за межі наших можливостей.
Але за наявності фінансування в найкоротший термін ми зробимо та піднімемо у повітря та електричний апарат. Оскільки найскладніші елементи конструкції нами вже створені.
-4-
Чому ГЗК (гвинти змінного кроку)?
ГЗК (гвинти змінного кроку) дозволяють вирішити головну проблему – інерції повітряних гвинтів. Так як у нашому проекті зміна тяги повітряного гвинта відбувається не за рахунок зміни обертів повітряного гвинта, а за рахунок зміни кроку лопаті при постійних обертах!
Змінити кут установки лопаті на 3-5 градусів набагато простіше та швидше, ніж намагатися перемогти інерцію повітряного гвинта. За нашої схеми інерція повітряних гвинтів та трансмісії – тільки в плюс! Допомагає підтримувати постійні оберти при зміні навантаження повітряного гвинта в процесі управління.
-5-
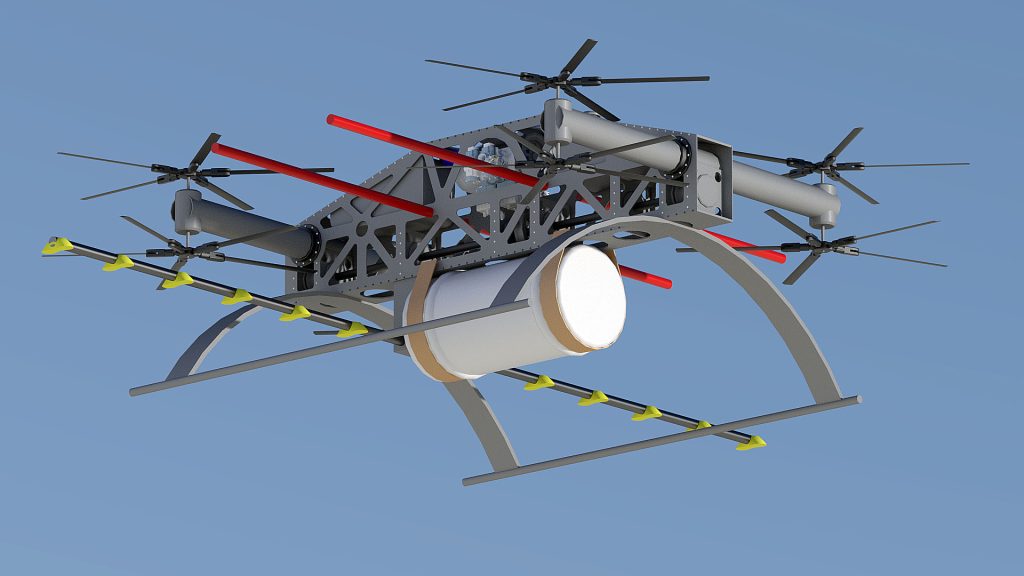
ВАРІАНТИ ВКОРИСТАННЯ
У порівнянні з існуючими літальними апаратами основна перевага проекту — насамперед простота використання нашого літаючого апарату!
Використання електронного керування дозволяє передбачити питання безпечної експлуатації ще на стадії проектування.
Наша конструкція дозволяє створювати як пілотовані літальні апарати, управління яким доступне практично будь-якій людині, так і у безпілотному варіанті.

-6-
БЕЗПЕКА ПОЛЬОТУ
Для безпечного польоту важливою є надійність усіх систем управління, особливо електронних.
Ми використовуватимемо польотний контролер, у якому передбачається триразове резервування всього, зокрема і процесорів. Це дозволить забезпечити потрібну стійкість до відмов.
Безпека польоту електричного варіанту забезпечується відсутністю трансмісії та наявністю 4 електромоторів. При відмові одного з них можливе безпечне кероване зниження для посадки.
-8-
ПРОБЛЕМИ ПРОЕКТУ
Основні проблеми проекту пов’язані із питаннями фінансового характеру, оскільки ми реалізуємо проект без участі інвесторів.
Так як основне завдання прототипу – перевірка основної ідеї та технічних рішень – правильного з’єднання механіки та електроніки – тривалі польоти на стадії налагодження та випробувальних польотів не передбачалися. Практично весь апарат виготовлений із сталі. Що знизило вартість проведення наземних випробувань та доведення, але не дозволяє через зайву вагу прямо перейти до льотних випробувань. Потрібно виготовити апарат із легких матеріалів. А наші фінансові можливості цього вже не дозволяють. Ми самостійно фінансували проект із 2017 року.

Крім того, ми поки що не маємо можливості створити свій спеціалізований польотний контролер (з тих самих причин фінансового характеру). На серійному зразку процеси самодіагностики та налаштування повинні бути як на автомобілі – «ввімкнув запалювання – контрольні лампочки запалилися – коли вони згасли – все гаразд» – можна заводити двигун і їхати.
Але це – наступний етап у розвитку проекту.
Hits: 248