.png)
.png)

ЧЕМ НАШ ПРОЕКТ ЛУЧШЕ ДРУГИХ
В идее «увеличения дронов» для использования в качестве летательного аппарата для человека — нет ничего нового или оригинального!
Сейчас в интернете есть информация о массе проектов, создатели которых пытаются осуществить эту идею. Практически все эти проекты повторяют технические решения маленьких дронов.
Мы подошли к решению этой проблемы комплексно!
Больше того – в отличие от множества проектов, широко рекламирующих себя в прессе, но не имеющих ничего кроме компьютерных картинок, нами реально СПРОЕКТИРОВАНЫ, ИЗГОТОВЛЕНЫ и ИСПЫТАНЫ:
– электронноуправляемые винты изменяемого шага;
– трансмиссия;
– электронная система управления двигателем.

Видео реальных испытаний можно увидеть на нашем YouTube-канале – https://www.youtube.com/channel/UCWBKG8SqTNnHoY0jIDAYJGw/videos
Для обеспечения разумного компромисса между управляемостью, надежностью и КПД, для управления полетом, мы выбрали схему с ВИШ (воздушными винтами изменяемого шага).
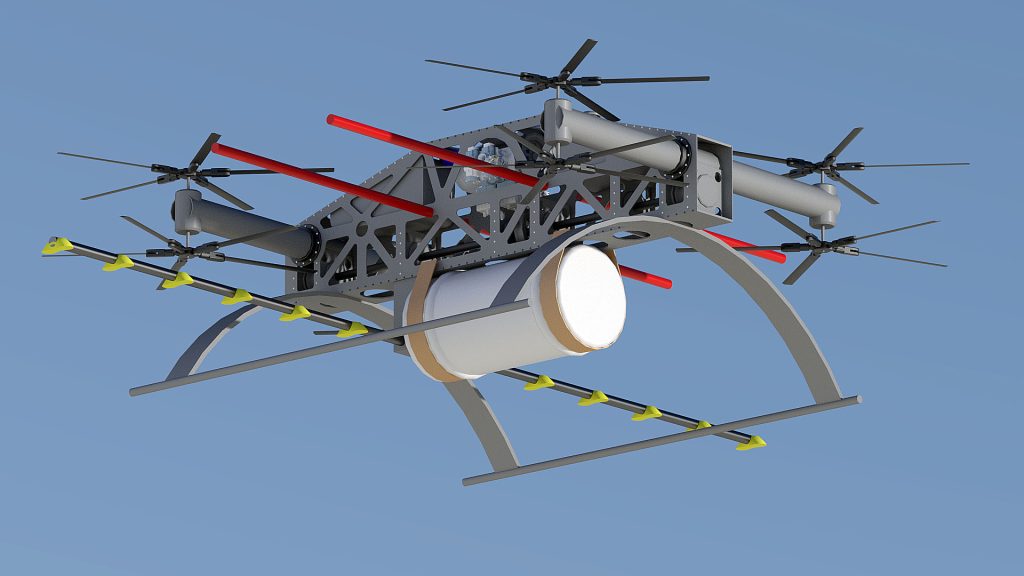
Фактически мы создаем «универсальную платформу», которая позволяет создать аппарат, наиболее подходящий пользователю – ПИЛОТИРУЕМЫЙ И БЕСПИЛОТНЫЙ вариант, с ЭЛЕКТРОДВИГАТЕЛЯМИ и с ДВИГАТЕЛЯМИ ВНУТРЕННЕГО СГОРАНИЯ (ДВС).
Из одинаковых основных узлов (системы управления полетом — полетного контроллера и электронноуправляемых ВИШ) возможно «собрать» аппарат с электромоторами и с ДВС.
При этом, для увеличения грузоподъемности (если понадобится не 2-х, а 4-х местный вариант) не требуется устанавливать 6-8-10 и больше воздушных винтов и моторов. Схема не меняется – 4 ВИШ, нужно только изменить диаметр пропеллера.
-2-
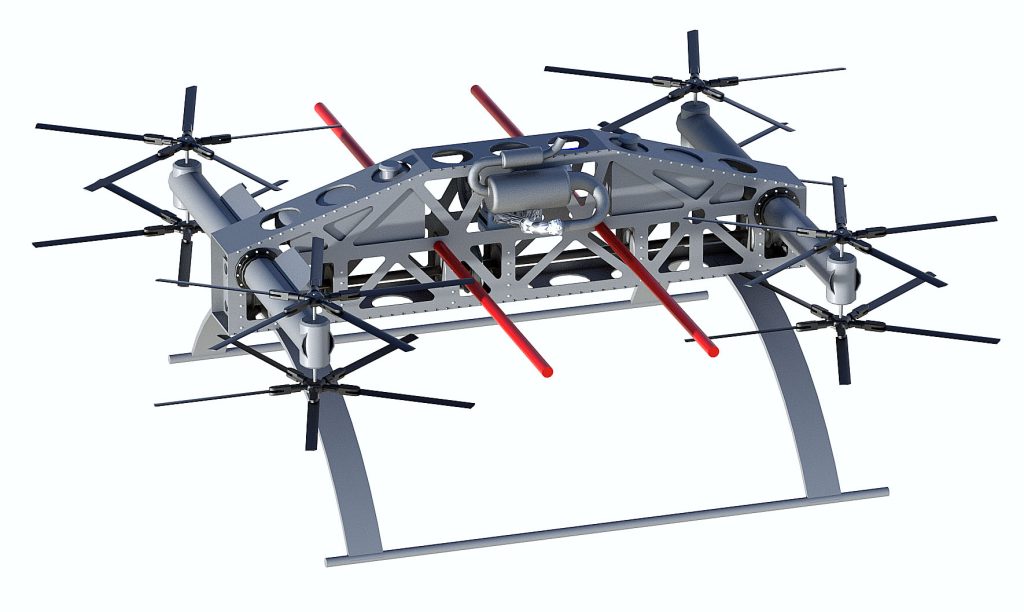
ВЫБРАННАЯ НАМИ СХЕМА
Практически все существующие проекты других стартапов выросли из идеи «масштабирования» обычных маленьких ЭЛЕКТРОдронов — квадро-, гекса, окто- и прочих коптеров.
Поэтому у появляющихся проектов много двигателей – по образу и подобию хорошо летающих маленьких дронов.
Но начав увеличивать масштаб дрона, проектировщики сталкиваются с проблемой — ДРОНЫ НЕ МАСШТАБИРУЮТСЯ!!!
Точнее — способы решения проблем маленьких дронов неприменимы к большим.
Так как для управления маленьким дроном достаточно просто менять обороты соответствующих двигателей.
Но на большом дроне, даже с электродвигателями, это не срабатывает! Так как одно дело — менять обороты (и соответственно тягу) маленького двигателя с весом воздушного винта в 5-10 граммов, и другое — попытаться быстро изменить обороты воздушного винта весом в 2-3 килограмма, вращающегося на 3000 оборотов!
Инерция воздушных винтов мешает!
Поэтому ставят много маленьких электродвигателей с маленькими воздушными винтами.
Проблема инерции (и соответственно — управления) частично решается…
НО!.. Появляется другие проблемы. Но они не такие очевидные. По крайней мере — пока это прототипы. Не рассчитанные на практическое использование.
Одна из проблем — КПД.
КПД одного двигателя на 100 кВт значительно выше 10 двигателей по 10 кВт.
КПД и тяга одного пропеллера площадью 10 кв.м. намного выше, чем у 10 пропеллеров по 1 кв.м.
То есть — при попытке просто увеличить маленький дрон, используя большое количество маленьких двигателей с маленькими пропеллерами, и так небольшой запас энергии в аккумуляторе бездарно тратится на нагрев окружающего воздуха, а не на полезную работу!
Даже для перевозки одного пассажира в других проектах предполагается использовать 8-16(!!!!) моторов!
А если нужен аппарат для перевозки тонны груза? 30?.. 50 двигателей ставить?
При попытке же заменить электродвигатели на ДВС — появляются еще и другие проблемы — попытка быстро изменить тягу ДВС тоже не просто решается… Опять таки — инерция двигателя!!!
Поэтому мы выбрали оптимальную схему, позволяющую уйти от перечисленных выше недостатков – аппарат с ДВС и электронноуправляемыми ВИШ.

-3-
БЕНЗИН или ЭЛЕКТРИЧЕСТВО?
В настоящее время активно и очень быстро развивается электротранспорт. За ним будущее! Но летать нужно не завтра, а уже сегодня. И тут возникает проблема.
Для нормального движения электромобиля ему достаточно электромотора мощностью около 100кВт. И емкости батареи в 55-85 кВч достаточно (учитывая, что полная мощность мотора используется только при разгоне) для работы электромотора на протяжении 4-6 часов, обеспечивается пробег в 300-500 км. Чего в большинстве случаев вполне достаточно, особенно для езды в городе.
Для нормального полета легкого самолета, весом 650 кг, достаточно тяги воздушного винта 150-200кг, что обеспечивает электромотор мощностью в те же 100кВт. Но самолет, в отличии от автомобиля, летит при постоянной мощности в 70-80% от максимальной. И батареи в 55-85 кВч хватит только на 30-40 минут полета. Но это уже более-менее реально.
Но для вертикального взлета и полета летательного аппарата типа вертолета или коптера весом 650 кг требуется тяга воздушных винтов в 750-850 кг! И тут требуется мощность моторов 200-250 кВт. Соответственно, батареи в 55-85 кВч хватит только на 5-10 минут полета.
Увы, но этого слишком мало для нормальной эксплуатации.
Но прогресс в развитии аккумуляторов продолжается. И к моменту появления подходящих аккумуляторов должны быть готовы остальные технические решения.
Мы так и делаем!
В нашей конструкции, и в варианте с электромоторами, и с ДВС, используются одинаковые системы управления полетом (полетный контроллер) и электронноуправляемые ВИШ.
Их конструкция нами создана и испытана.
В настоящее время мы создали аппарат с ДВС. По причинам финансового характера (пока мы реализуем наш проект на собственные средства, без инвесторов), покупка электромоторов и батареи пока выходит за рамки наших возможностей.
Но при наличии финансирования в кратчайшие сроки мы сделаем и поднимем в воздух и электрический аппарат. Так как наиболее сложные элементы конструкции нами уже созданы.
-4-
Почему ВИШ (воздушные винты изменяемого шага)?
ВИШ (винты изменяемого шага) позволяют решить главную возникающую проблему – инерции воздушных винтов. Так как в нашем проекте изменение тяги воздушного винта происходит не за счет изменения оборотов воздушного винта, а за счет изменения шага лопасти при постоянных оборотах!
Изменить угол установки лопасти на 3-5 градусов намного проще и быстрее, чем пытаться победить инерцию воздушного винта. При нашей схеме инерция воздушных винтов и трансмиссии – только в плюс! Помогает поддерживать постоянные обороты при изменении нагрузки на воздушный винт в процессе управления.
-5-
ВАРИАНТЫ ИСПОЛЬЗОВАНИЯ
В сравнении с существующими летательными аппаратами основное достоинство проекта — в первую очередь простота использования нашего летающего аппарата!
Использование электронного управления позволяет предусмотреть вопросы безопасной эксплуатации еще на стадии проектирования.
Наша конструкция позволяет создавать как пилотируемые летательные аппараты, управление которым доступно практически любому человеку, так и в беспилотном варианте.

-6-
БЕЗОПАСНОСТЬ ПОЛЕТА
Для безопасного полета важна надежность всех систем управления, особенно электронных.
Мы будем использовать полетный контроллер, в котором предусматривается трехкратное резервирование всего, в том числе и процессоров. Это позволит обеспечить нужную отказоустойчивость.
Безопасность полета электрического варианта обеспечивается отсутствием трансмиссии и наличием 4 электромоторов. При отказе одного из них, возможно безопасное управляемое снижение для посадки.
-8-
ПРОБЛЕМЫ ПРОЕКТА
Основные проблемы проекта связаны с вопросами финансового характера, так как мы реализуем проект без участия инвесторов.
Так как основная задача прототипа — проверка основной идеи и технических решений — правильного соединения механики и электроники — длительные полеты на стадии наладки и испытательных полетов не предусматривались. Практически весь аппарат изготовлен из стали. Что снизило стоимость проведения наземных испытаний и доводки, но не позволяет из-за излишнего веса прямо перейти к летным испытаниям. Требуется изготовить аппарат из легких материалов. А наши финансовые возможности это уже не позволяют. Мы самостоятельно финансировали проект с 2017 года.

Кроме того, мы пока не имеем возможности создать свой специализированный полетный контроллер (по тем же причинам финансового характера). На серийном образце процессы самодиагностики и настройки должны быть как на автомобиле — «включил зажигание — контрольные лампочки зажглись — когда они потухли — всё в порядке» — можно заводить двигатель и ехать.
Но это – следующий этап в развитии проекта.
Просмотров: 248