.png)
.png)

WHAT IS OUR PROJECT BETTER THAN OTHERS
There is nothing new or original about the idea of ”enlarging drones”!
Now on the Internet there is information about the mass of projects, the creators of which are trying to implement this idea. Almost all of these projects repeat the technical solutions of small drones.
We have come up with a comprehensive approach to solving this problem!
Moreover, unlike many projects that widely advertise themselves in the press, but have nothing but computer images, we really DESIGNED, MANUFACTURED and TESTED:
– electronically controlled variable pitch propellers;
– transmission;
– electronic engine control system.

Videos of real tests can be seen on our YouTube channel – https://www.youtube.com/channel/UCWBKG8SqTNnHoY0jIDAYJGw/videos
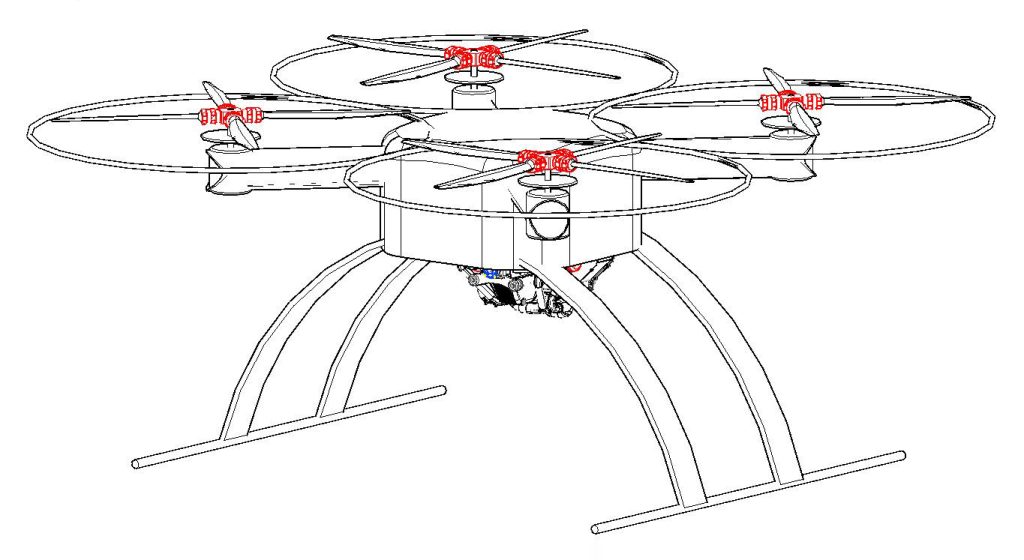
To ensure a reasonable compromise between controllability, reliability and efficiency, for flight control, we have chosen a scheme with variable pitch propellers.
In fact, we are creating a “universal platform” that allows us to create a device that is most suitable for the user – a PILOTED AND UNMANNED version, with ELECTRIC MOTORS and with INTERNAL COMBUSTION ENGINES (ICE).
It is possible to “assemble” a device with electric motors and an internal combustion engine from the same basic units (flight control systems – a flight controller and electronically controlled propellers).
At the same time, to increase the carrying capacity (if you need not a 2, but a 4-seater version), it is not required to install 6-8-10 or more propellers and motors. The scheme does not change – 4 pitch propellers, you just need to change the diameter of the propeller.
-2-
CHOSEN SCHEME
Almost all existing projects of other startups have grown out of the idea of ”scaling” ordinary small ELECTRO drones – quadro-, hexa, octo- and other copters.
Therefore, emerging projects have many engines – in the image and likeness of well-flying small drones.
But starting to scale up the drone, the designers are faced with a problem – DRONES DO NOT SCALE !!!
More precisely, the solutions to the problems of small drones are not applicable to large ones.
Because to control a small drone, you just need to change the speed of the corresponding engines.
But on a large drone, even with electric motors, it doesn’t work! Since it is one thing to change the speed (and, accordingly, the thrust) of a small engine with a propeller weight of 5-10 grams, and another thing is to try to quickly change the speed of the propeller weighing 2-3 kilograms, rotating at 3000 rpm!
The inertia of the propellers is in the way!
Therefore, many small electric motors with small propellers are installed.
The problem of inertia (and, accordingly, control) is partially solved …
BUT! .. Other problems appear. But they are not so obvious. At least for now, these are prototypes. Not intended for practical use.
One of the problems is efficiency.
The efficiency of one motor per 100 kW is significantly higher than 10 motors of 10 kW.
Efficiency and thrust of one propeller with an area of 10 sq.m. much higher than 10 propellers of 1 sq. m.
That is, when trying to simply increase a small drone using a large number of small motors with small propellers, and so a small amount of energy in the battery is wasted on heating the surrounding air, and not on useful work!
Even for the carriage of one passenger in other projects, it is supposed to use 8-16 (!!!!) motors!
And if you need a device to transport a ton of cargo? 30? .. To put 50 engines?
When you try to replace the electric motors with the internal combustion engine, other problems appear – an attempt to quickly change the thrust of the internal combustion engine is also not easy to solve … Again – the inertia of the engine !!!
Therefore, we chose the optimal scheme that allows us to get away from the disadvantages listed above – a device with an internal combustion engine and electronically controlled VPP (variable pitch propellers).

-3-
PETROL or ELECTRICITY?
Currently, electric transport is actively and very rapidly developing. The future belongs to him! But you need to fly not tomorrow, but today. And this is where the problem arises.
For the normal movement of an electric car, an electric motor with a capacity of about 100 kW is enough. And the battery capacity of 55-85 kWh is sufficient (considering that the full power of the motor is used only during acceleration) for the operation of the electric motor for 4-6 hours, a mileage of 300-500 km is provided. Which is quite enough in most cases, especially for driving in the city.
For a normal flight of a light aircraft weighing 650 kg, a propeller thrust of 150-200 kg is sufficient, which provides an electric motor with a power of the same 100 kW. But an airplane, unlike a car, flies at a constant power of 70-80% of the maximum. And a 55-85 kWh battery will only last for 30-40 minutes of flight. But this is more or less real.
But for vertical take-off and flight of an aircraft such as a helicopter or a copter weighing 650 kg, a thrust of propellers of 750-850 kg is required! And here the power of the motors is 200-250 kW. Accordingly, a 55-85 kWh battery will only last for 5-10 minutes of flight.
Alas, this is too little for normal use.
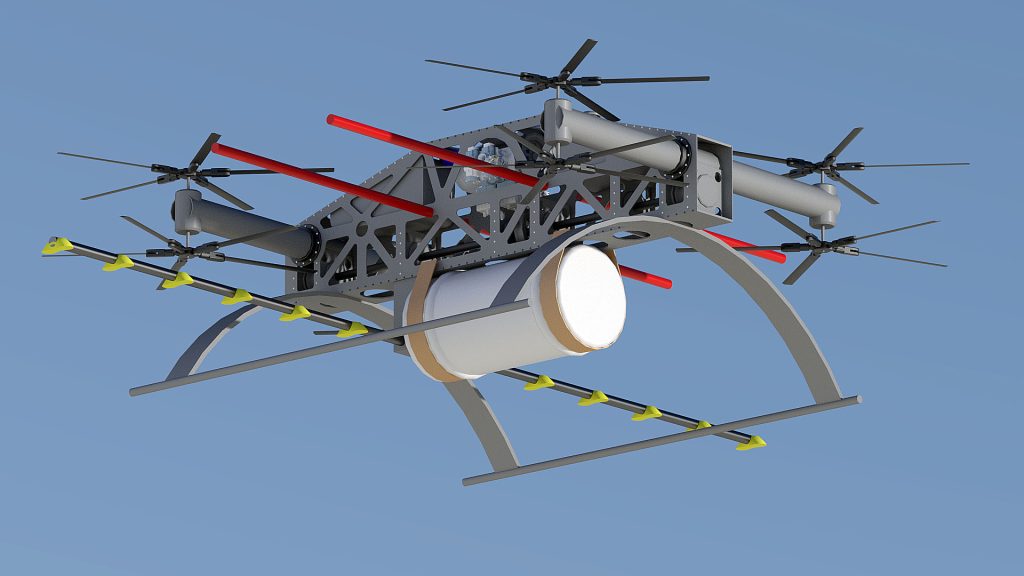
in the “flying boat” version with internal combustion engines
But progress in battery development continues. And by the time suitable batteries appear, the rest of the technical solutions should be ready.
That’s what we do!
In our design, both in the version with electric motors and with internal combustion engines, the same flight control systems (flight controller) and electronically controlled propellers are used.
We have created and tested their design.
Currently, we have created a device with an internal combustion engine. For financial reasons (while we are implementing our project with our own funds, without investors), the purchase of electric motors and batteries is still beyond our capabilities.
But with the availability of funding, as soon as possible, we will make and lift the electrical apparatus into the air. Since the most complex structural elements have already been created by us.
-4-
Why VPP (Variable Pitch Propellers)?
VPP (variable pitch propellers) allow solving the main arising problem – the inertia of propellers. Since in our project the change in the propeller thrust occurs not due to the change in the propeller speed, but due to the change in the blade pitch at constant speed!
Changing the blade angle by 3-5 degrees is much easier and faster than trying to defeat the propeller inertia. With our scheme, the inertia of the propellers and the transmission is only a plus! Helps maintain constant RPM when the load on the propeller changes during control.
-5-
OPTIONS OF USE
In comparison with existing aircraft, the main advantage of the project is, first of all, the ease of use of our aircraft!
The use of electronic control makes it possible to foresee the issues of safe operation at the design stage.
Our design allows us to create both manned aircraft, which can be controlled by almost any person, and in an unmanned version.

-6-
FLIGHT SAFETY
For a safe flight, the reliability of all control systems, especially electronic ones, is important.
We will use a flight controller, which provides for three-fold redundancy of everything, including processors. This will provide the required resiliency.
The flight safety of the electric version is ensured by the absence of a transmission and the presence of 4 electric motors. If one of them fails, a safe controlled descent for landing is possible.
-8-
PROBLEMS OF THE PROJECT
The main problems of the project are related to financial issues, since we are implementing the project without the participation of investors.
Since the main task of the prototype is to test the basic idea and technical solutions – the correct connection of mechanics and electronics – long flights at the adjustment stage and test flights were not envisaged. Almost the entire device is made of steel. This has reduced the cost of ground testing and development, but does not allow us to proceed directly to flight testing due to excess weight. It is required to make the device from lightweight materials. But our financial capabilities no longer allow this. We have independently financed the project since 2017.

In addition, we do not yet have the opportunity to create our own specialized flight controller (for the same financial reasons). On a production model, the self-diagnosis and setup processes should be the same as on a car – “turn on the ignition – the indicator lights come on – when they go out – everything is in order” – you can start the engine and drive.
But this is the next stage in the development of the project.
-9-
Hits: 248